



Описание

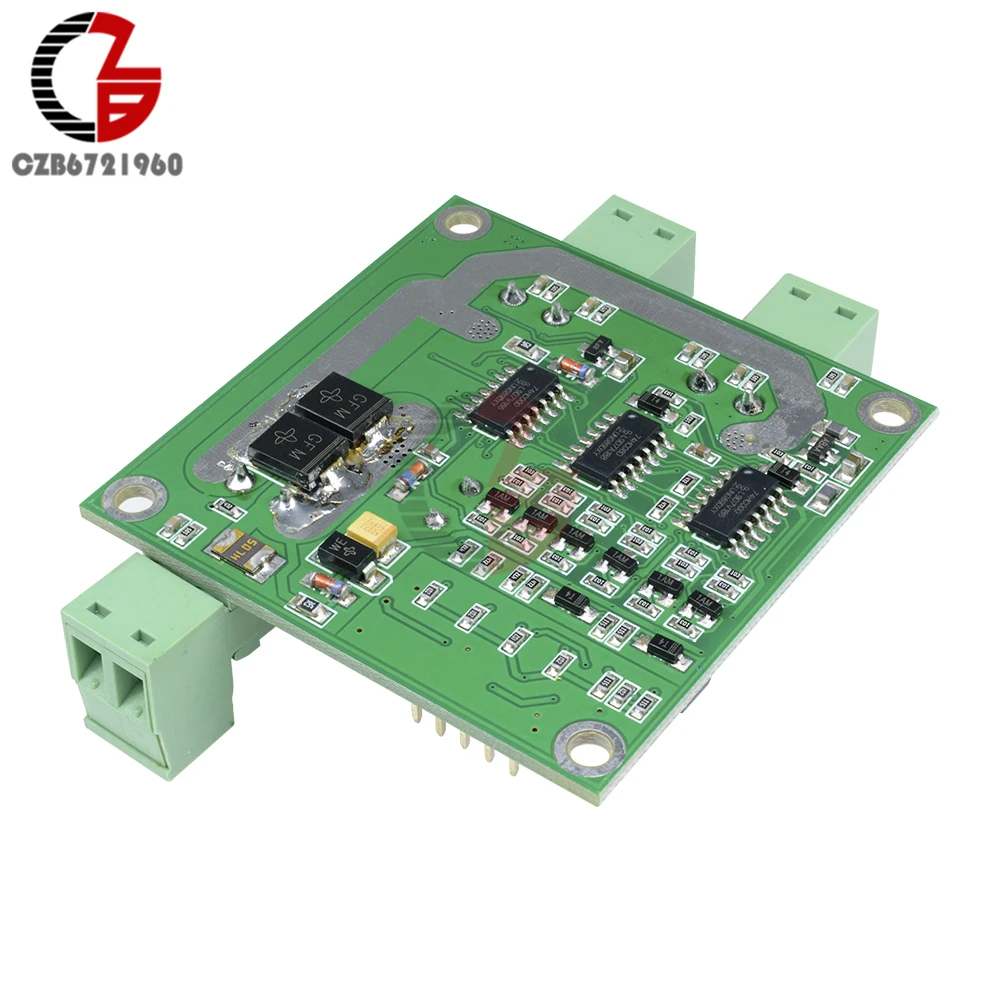
12 В 24 В 7A 160 Вт двойной модуль драйвера двигателя постоянного тока h-мост L298 логическое управление сигнала оптрон ШИМ привод заднего хода торможения
Принцип обзор:
Н-мостовой модуль ворота цепи, двигатель Реверсивный комбинации с МОП-Транзисторы, торможение и контроль скорости. Оба имеют аналогичный большой выходной ток L298 гибкий логический контрольный сигнал.
Помехи: контроль сигнала изоляции оптрон, подавление напряжения шипа питания.
Логика управляющего сигнала: L298 с помощью ворот для достижения аналогичной логики управления.
Метод Н-моста: Используйте р, п дополнительные МОП-транзисторы для достижения Н-моста.
Защита напряжения питания: Используйте чип сброса защиты от пониженного напряжения.
Особенности:
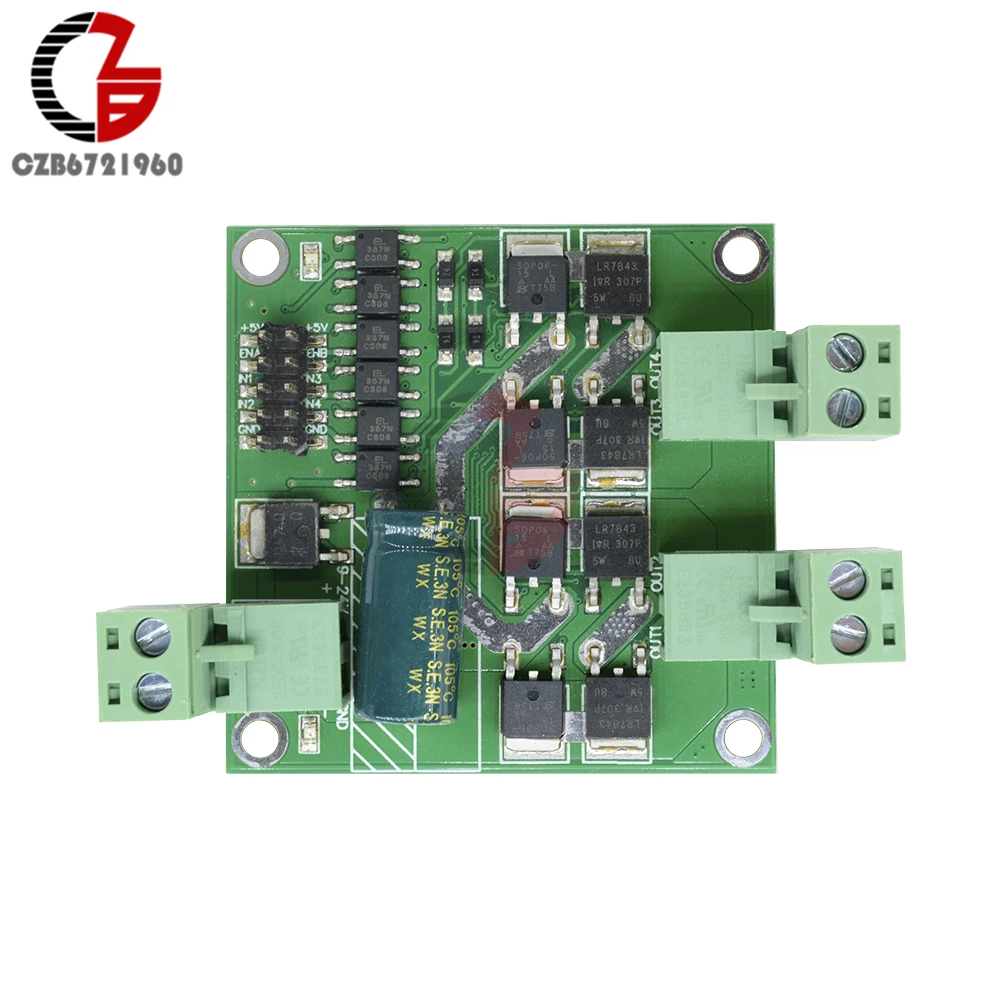
Двойной h-мост
Номинальная 7A/дорожный велосипед
Оптрон
Защита от недостаточного напряжения
Очень маленький размер, всего 5,5x5,5 см
Поддержка напряжения 7 V ~ 24 V, защита от пониженного напряжения
Двойной интерфейс двигателя, каждый Номинальный выходной ток 7а
L298 аналогичная логика управления, каждый поддерживается трехпроводным управлением, реверсивным и торможением
Включение сигнала к внешнему ШИМ, переключение концевого переключателя заднего хода может быть подключено в серии
Контрольные драйверы сигнала, поддержка подавляющего большинства одночиповых прямых дисков
Используйте изоляцию оптопары для всех сигналов управления
Электростатического разряда цепи
Технические характеристики:
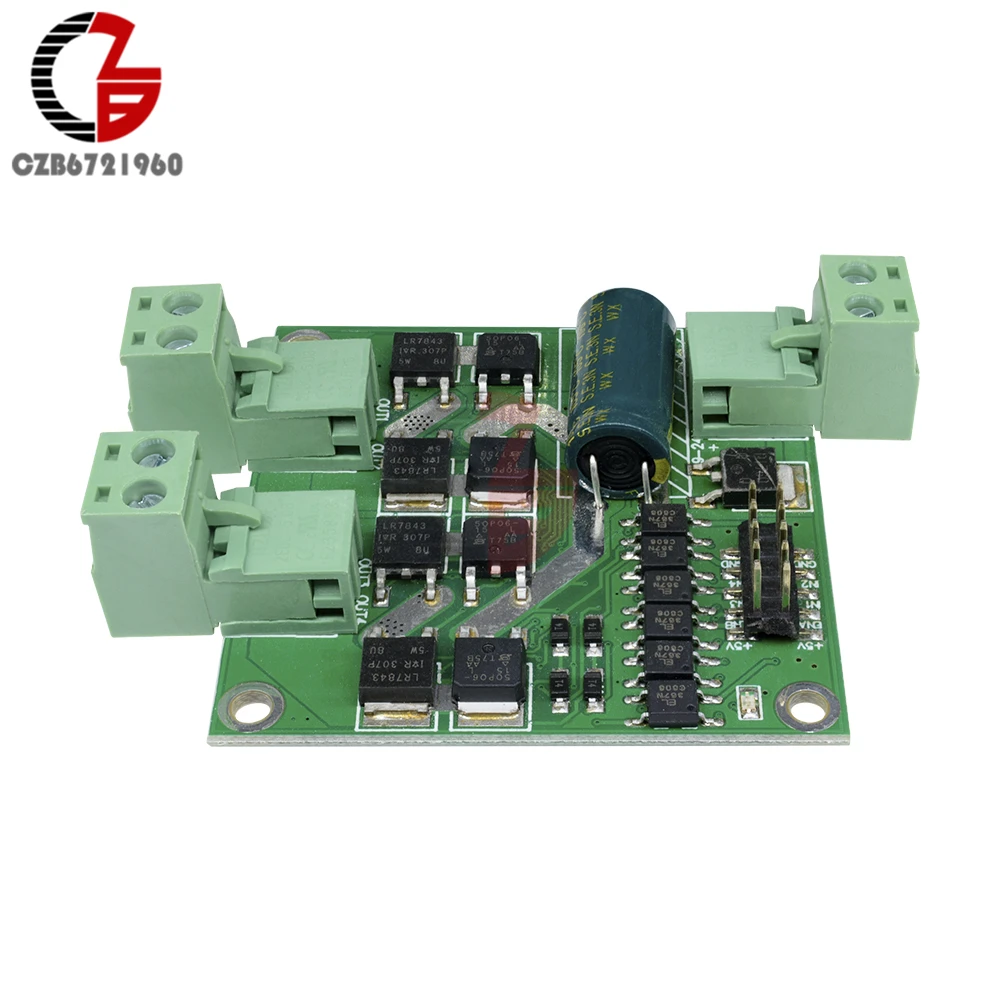
Диапазон входного напряжения: DC 6,5 V ~ 27 V
Номинальное входное напряжение: DC 12 V/24 V
Выходные каналы: 2-way
Номинальный выходной ток на канал: 7а
Пиковый выходной ток на канал: 50A
Каждая Номинальная выходная мощность: 84 Вт (12 В питания) 168 Вт (24 В питания)
Напряжение контрольного сигнала: 3 ~ 6,5 в
Каждый контрольный ток сигнала: 3 ~ 11 мА
Минимальная Эффективная ширина импульса ШИМ: 5us
Рабочая температура:-25 ℃ ~ 80 ℃
Размеры: 5,5x5,5x2,0 см
Н-мостовой модуль ворота цепи, двигатель Реверсивный комбинации с МОП-Транзисторы, торможение и контроль скорости. Оба имеют аналогичный большой выходной ток L298 гибкий логический контрольный сигнал.
Помехи: контроль сигнала изоляции оптрон, подавление напряжения шипа питания.
Логика управляющего сигнала: L298 с помощью ворот для достижения аналогичной логики управления.
Метод Н-моста: Используйте р, п дополнительные МОП-транзисторы для достижения Н-моста.
Защита напряжения питания: Используйте чип сброса защиты от пониженного напряжения.
Особенности:
Двойной h-мост
Номинальная 7A/дорожный велосипед
Оптрон
Защита от недостаточного напряжения
Очень маленький размер, всего 5,5x5,5 см
Поддержка напряжения 7 V ~ 24 V, защита от пониженного напряжения
Двойной интерфейс двигателя, каждый Номинальный выходной ток 7а
L298 аналогичная логика управления, каждый поддерживается трехпроводным управлением, реверсивным и торможением
Включение сигнала к внешнему ШИМ, переключение концевого переключателя заднего хода может быть подключено в серии
Контрольные драйверы сигнала, поддержка подавляющего большинства одночиповых прямых дисков
Используйте изоляцию оптопары для всех сигналов управления
Электростатического разряда цепи
Технические характеристики:
Диапазон входного напряжения: DC 6,5 V ~ 27 V
Номинальное входное напряжение: DC 12 V/24 V
Выходные каналы: 2-way
Номинальный выходной ток на канал: 7а
Пиковый выходной ток на канал: 50A
Каждая Номинальная выходная мощность: 84 Вт (12 В питания) 168 Вт (24 В питания)
Напряжение контрольного сигнала: 3 ~ 6,5 в
Каждый контрольный ток сигнала: 3 ~ 11 мА
Минимальная Эффективная ширина импульса ШИМ: 5us
Рабочая температура:-25 ℃ ~ 80 ℃
Размеры: 5,5x5,5x2,0 см
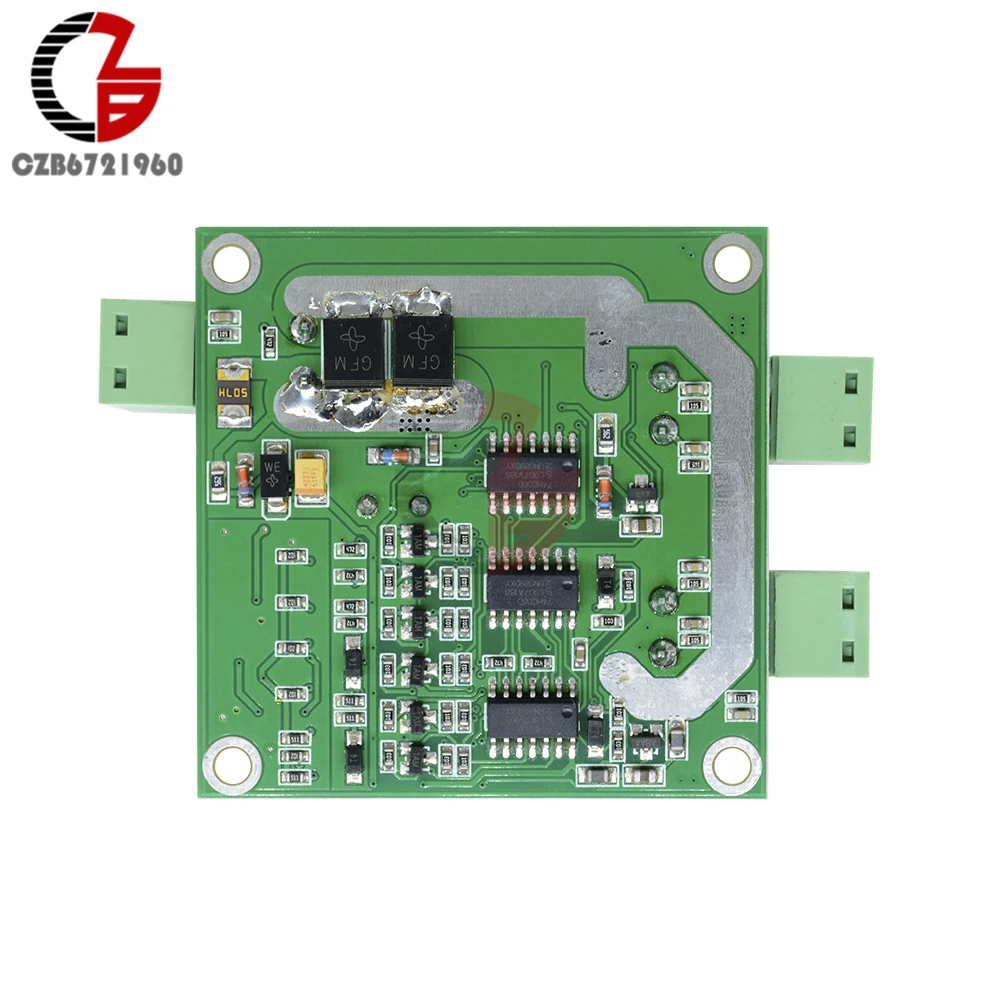
Диаметр монтажного отверстия составляет 3 мм, рекомендуется использовать Винты M3 для фиксации.
Обратите внимание, что при установке не допускайте короткого замыкания, вы можете добавить изоляционную прокладку или использовать Tongzhu, поднимая доску.
Посылка включает в себя:
1x12 V/24 V 7A 160 W модуль драйвера двигателя постоянного тока


Управление сигнала логики
1. Логика интерфейса управления двигателем
| IN1 | IN2 | Ена | OUT1 、 out2output |
| × | Тормоза | ||
| 1 | 1 | × | Свободных |
| 1 | PWM | PWM Вперед Скорость | |
| 1 | PWM | PWM Обратный Скорость | |
| 1 | 1 | Полный вперед | |
| 1 | 1 | Полный разворот |
Примечание: Входной сигнальный поплавок
2. Логика интерфейса управления двигателем
| IN3 | IN4 | ENB | OUT3 、 out4output |
| × | Тормоза | ||
| 1 | 1 | × | Свободных |
| 1 | PWM | Вперед Скорость | |
| 1 | PWM | PWM Обратный Скорость | |
| 1 | 1 | Полный вперед | |
| 1 | 1 | Полный разворот |
Примечание: Входной сигнальный поплавок
Типичный пример подключения
1. MCU управление мотором вращения проводки

Блок питания MCU и управление доской драйвера питания сигнала должны быть общей почвой, но не с блоком питания двигателя GND общей почвой.
При использовании микроконтроллера 5 в плата драйвера + 5 В источник питания составляет + 5 В; при использовании микроконтроллера 3,3 В плата драйвера + 5 В источник питания составляет 3,3 В.
Микроконтроллер и управление доской драйвера сигнала могут совместно использовать блок питания или отдельный источник питания (но обязательно используйте общий язык).
Эна с микроконтроллером GPIO или ШИМ выходной порт подключен, когда Эна высокая, плата драйвера включена, Реверсивный или тормозной эффективный, если это PWM сигнал, тогда скорость двигателя может быть; низкая, плата вождения отключена, нет выходного электрического интерфейса.
В 1 и IN2 два GPIO, подключенных к микроконтроллеру (MCU может поддерживать любой порт IO 51, без подтягивающего резистора), управление двигателем заднего хода и торможения, логика привода на логическом столе.
2. Используйте кнопки для управления проводкой двигателя заднего хода

Которые, PB1 и PB2 для двух ключей.
При нажатии, в то время как PB1 PB2 не нажимается, В1 высок, В2 низок, мотор переносится; при нажатии, в то время как PB1 PB2 не нажимается, В1 низок, В2 высок, реверс двигателя; когда PB1 и PB2 подавлены или имеют отскок, IN2 и IN2 являются низкими или высокими, Тормоз двигателя (или тормоз).
См. Таблицу логики управления логическим сигналом.
Размеры высокой четкости






Характеристики
- Тип двигателя
- Двигатель постоянного тока
- Номер модели
- Dual DC Motor Driver Module
- Питание
- DC
Сопутствующие товары








176 руб.
437 заказов
